深度学习9个小时内教会机器人拿起和剥开香蕉
1,237 阅读
仅仅使用来自人类数据集的机器学习,在短短9个小时内,日本研究人员让一个机器人学会了如何拿起和剥开香蕉。
对机器人来说,操纵可变形的物体,如柔软的水果,是有问题的,因为物体建模有困难,而且对所需的力的类型和灵活性缺乏了解。
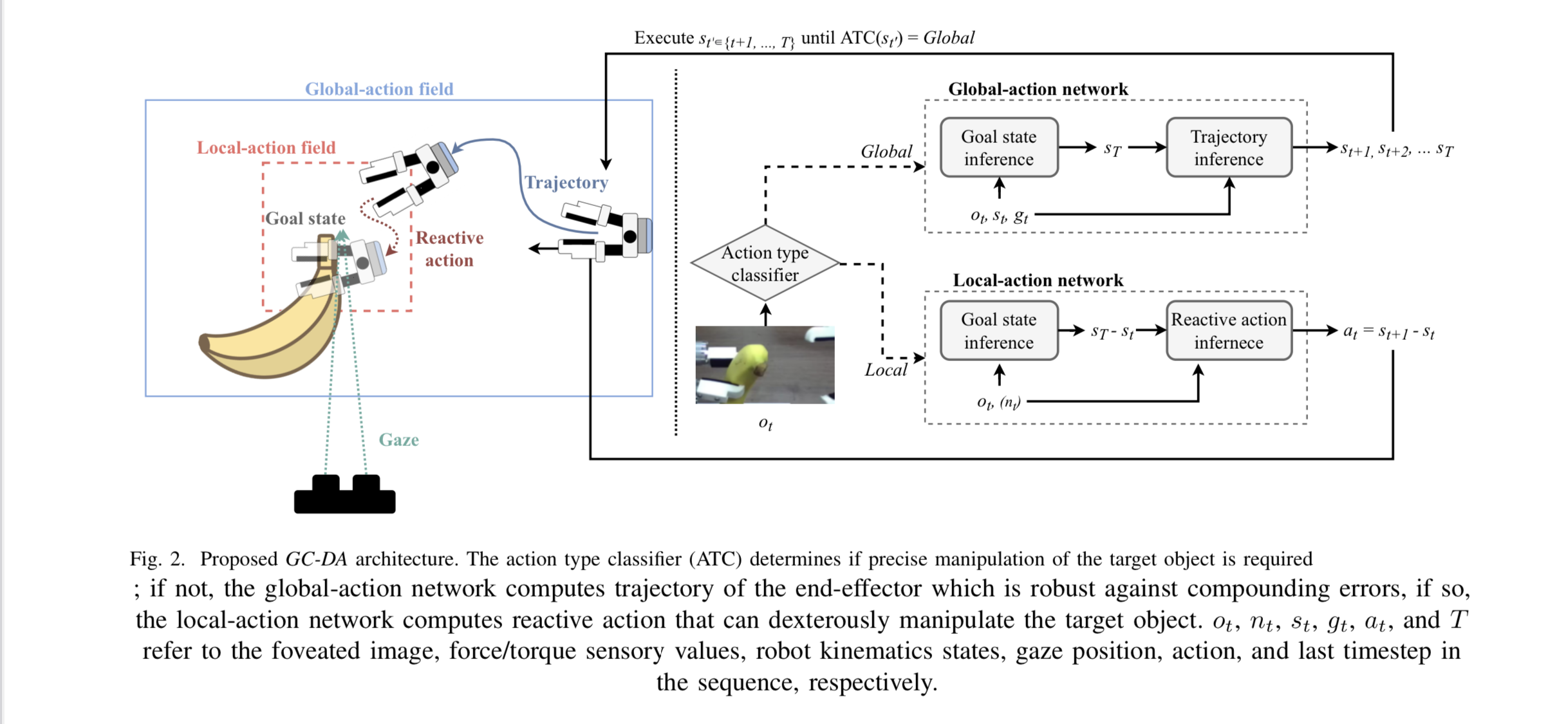
东京大学智能系统和信息学实验室的研究员Heecheol Kim与同事合作,开发了一个基于 "目标条件双行动深度模仿学习(DIL)"的系统。这可以利用人类的示范数据学习灵巧的操纵技能。

这项任务涉及九个阶段--从抓取香蕉到用一只手把它从桌子上拿起来,用另一只手抓住香蕉的尖端,剥皮,然后移动香蕉,这样就可以把剩下的皮去掉。整个过程需要不到三分钟。
据Kim说,该系统的数据效率很高,因为它只使用了13个小时的训练数据,而不是数百或数千小时。"他说:"它仍然需要相当多昂贵的GPU[图形处理单元],但通过使用我们的结构,我们可以减少[所需]的大量计算量。
该团队解释说,除了香蕉之外,该系统还可以更普遍地用于机器人处理需要精细运动技能的任务。Kim和他的团队的一篇论文本月发表在预印本服务器arXiv上。
arxiv地址:https://arxiv.org/abs/2203.09749
DataLearner 官方微信
欢迎关注 DataLearner 官方微信,获得最新 AI 技术推送